ロビの製作は8号~13号で右腕を組み立てる [週刊ロビ]
パーツ付き組み立てマガジンの週刊ロビの製作進捗の報告です。(#^^#)
1号~8号でロビの頭部外観が完成しましたがこれをステージ1と呼ぶようです。そして8号の後半からはステージ2へ入ります。ステージ2は腕のようで20号で両腕が完成するようです。長いですね。((+_+))
その前に、気になる頭部に貼ったカーボンシート(オレンジ)です。やはりシワと言うかタルミが気になりますね。

前回の貼り付けで何となく貼り付けイメージは出来たので作戦を考えました。(^O^)/
一人では無理です。本当は娘にドライヤーを持ってもらい私と奥さんの二人でカーボンシートを広げなら伸ばしながら貼れば良いのですが、この問題は私と奥さんのチームワークと言うか貼り付けイメージが、そして息が合ってる必要ありますが、100%息が合う必要の作業は無理です・・・w( ̄o ̄)w オオー!
と言うことで奥さんも外出して不在なので3人の作業は諦めて娘と二人で試みます。
娘がドライヤーを担当して私が一人で伸ばして貼ります。

どうでしょうか?
完璧とは言いませんが格段に綺麗に貼れました。これなら許容範囲の貼り付け結果です。\(^o^)/
正面はこんな感じです。

とりあえず気になるカーボンシートの貼り直しも完了したのでステージ2の右腕の製作を始めます。(^^♪
今回は8号の後半から13号までです。

今回も製作の前に8号の後半から13号までのパーツがあるかチェックです。
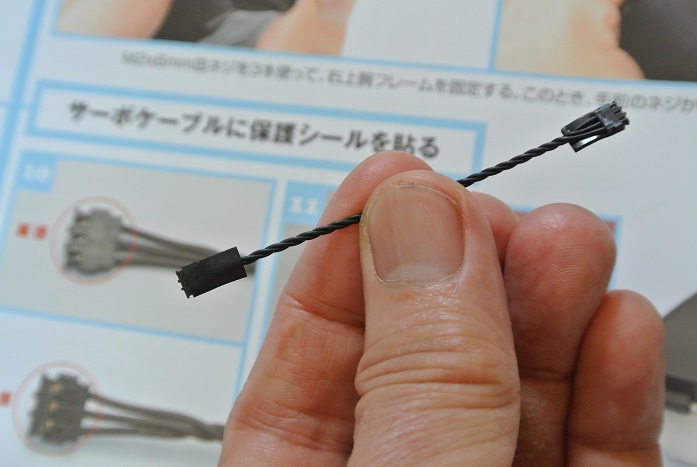
8号の後半作業の1「サーボケーブルに保護シールを貼る」

両端のコネクターに保護シールを貼るだけの作業です。(-_-;)
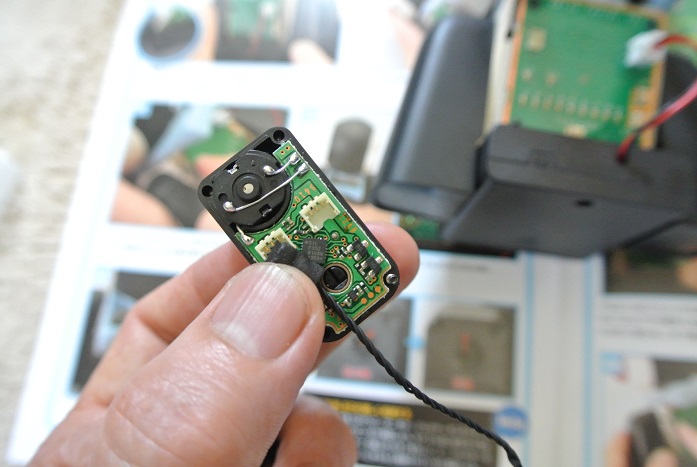
8号の後半作業の2「サーボにサーボケーブルを接続する」

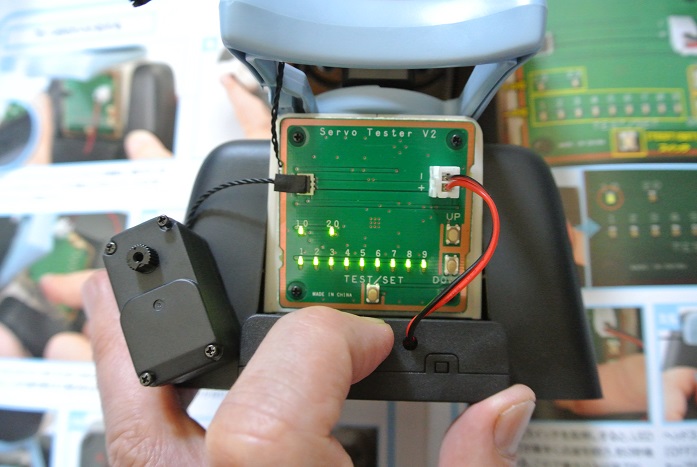
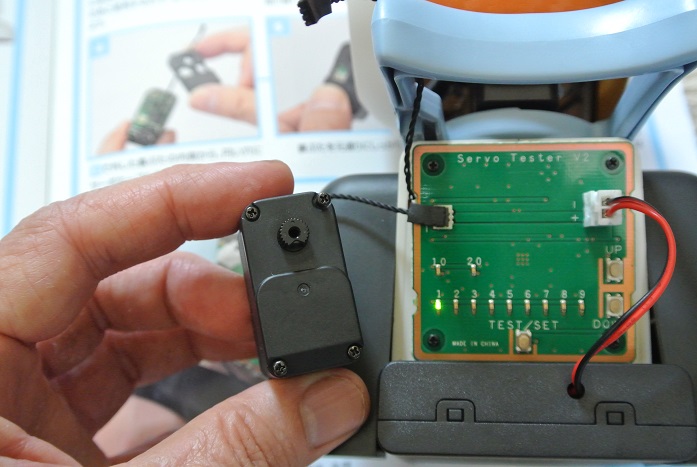
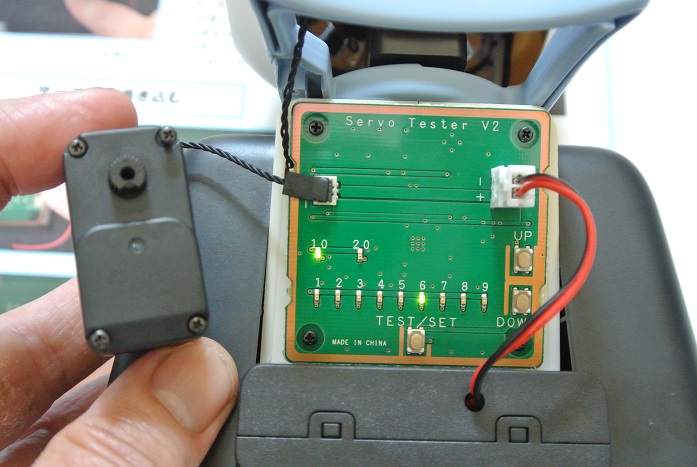
8号の後半作業の3「サーボのテストをする」
前回完成したロビの上半身の登場です。(^O^)/
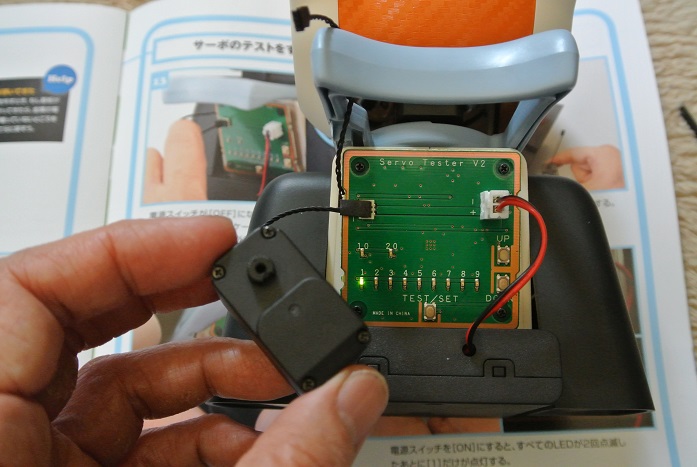
首のサーボモーターから出ているケーブルをテストボードのコネクターから外して、先程作成したサーボモーターのサーボケーブルを接続して「TEST/SET」スイッチを押します。
正常に左右に45°回転して正面で止まります。
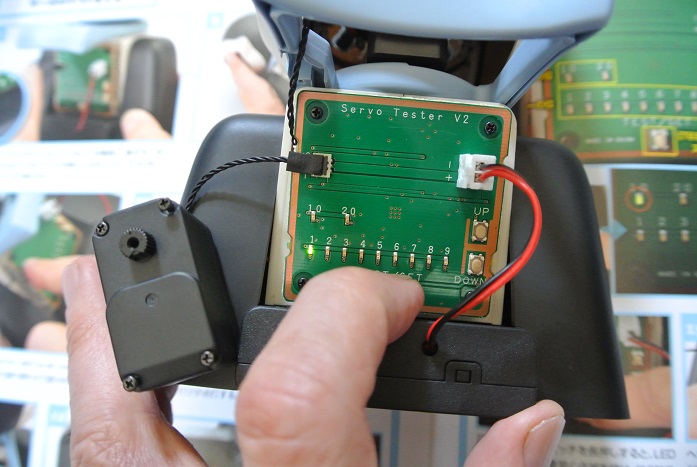
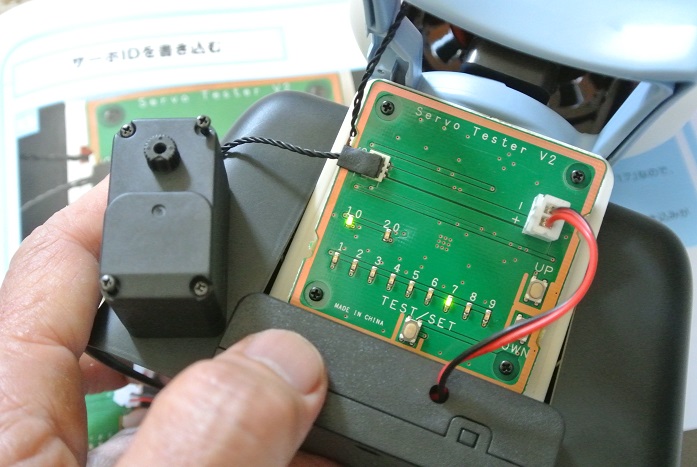
8号の後半作業の4「サーボIDを書き込む」
ロビには20個のサーボモーターが取り付けられますが、個々のサーボモーターにIDを設定します。それがサーボIDです。
今回組み立てたサーボモーターはこの後に右前腕に取り付けられますがサーボIDを18番で設定します。
設定は「UP/DOWN」スイッチでIDを選択して「TEST/SET」の長押しで簡単に設定できます。
次は9号で右前腕の組み立てに入ります。(^O^)/
9号作業の1「指ホルダーを取り付ける」

9号作業の2「親指を取り付ける」

ここで説明書を読んで重大な事実が判明しました。Σ(゚д゚lll)
何とロビの手首から先は動かないそうです。動かないかわりにゴム製の親指と指が付いていると書いているが、これが指なの?
ゴム製と書いているが固い材質と思います。(-_-;)
9号作業の3「サーボモーターを取り付ける」

8号で組み立てたサーボモーターの登場です。(#^^#)

9号作業の4「ひじのパーツを取り付ける」


ひじのパーツってのは、ひじ部分のカバーですね。
9号作業の5「前腕カバーを取り付ける」


おー!カバーを付けると雰囲気でますね。
次は10号で右ひじに右上腕フレームを取り付けるです。(^O^)/
10号作業の1「右ひじバックパネルを取り付ける」


10号作業の2「右上腕フレームを取り付ける」

10号作業の3「サーボケーブルに保護シールを貼る」
おっと10号は何とも地味な作業で終わってしまいました。
次は11号で右上腕フレームにサーボモーターを取り付けるです。(^O^)/
11号作業の1「サーボにサーボケーブルを接続する」

結局、サーボモーターは20個あるので、この手のサーボモーターを組み立てる作業だけって号数も結構ありそうですね。
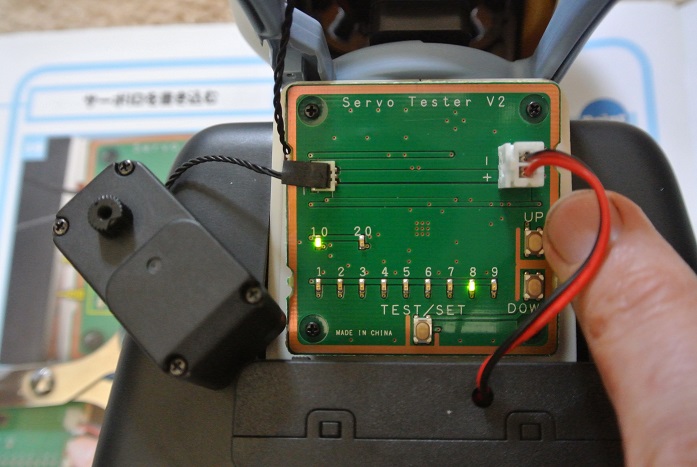
11号作業の2「サーボのテストをする」
何か簡単な作業だよね。と思いながらブツブツ作業してたら・・・
( ̄▽ ̄;)!! サーボモーターが反応しません。
LEDが激しく点滅するのですが、説明書を読むとケーブルの接続を再確認するようにとのことです。
ちょっと馬鹿にして作業を行ったようで・・・反省します。(;´д`)トホホ

今度は正常に左右に45°回転して正面で止まります。
11号作業の3「サーボIDを書き込む」
11号作業の4「2つのサーボを接続し、取り付ける」

既に右前腕にサーボモーターが付いていますが、ロビの配線は各サーボモーター同士をチェーン状に接続します。これを「デイジーチェーン」と言うそうです。


サーボモーター同士をケーブルで数珠つなぎすることでサーボモーターから隣のサーボモーターへと次々と中継することでマイコンボードへの配線本数を飛躍的に少なくしたそうです。
次は12号で右上腕に肩のパーツを取り付けるです。(^O^)/
12号作業の1「肩連結金具にケーブルを通す」

12号作業の2「肩フレームを取り付ける」

12号作業の3「肩パネルを取り付ける」

12号作業の4「サーボケーブルに保護シールを貼る」

12号はこれで終わりですが、最後にサーボケーブルに保護シールを貼って終わった時点で次の作業が想像出来ますね・・・w( ̄o ̄)w オオー!
次は13号で右肩サーボのテストを行い、IDを書き込むです。(^O^)/
13号作業の1「サーボにサーボケーブルを接続する」

13号作業の2「サーボのテストをする」
13号作業の3「サーボIDを書き込む」
えっ!13号はこれで終わりですか?せめて何かの組み立て位はやりたかったよー・"(>0<)"・

ところで未開封のネジ袋が2袋余ってます。未開封なので予備のネジじゃないのですが・・・

以上、ストックは13号までなので今回の製作は終わりです。
PS. ロビの右腕が出来上がった時に孫のMちゃんがNゲージ部屋に来ました。(#^^#)

おー!ロビの完成したばかりの腕と比べたら何と同じ大きさです。めちゃウケました。
yorokinoko さん

yorokinoko2 blog
ブログその2は画像をクリックするとジャンプします。

サポートシップパートナー
yorokinokoは、2014年から北海道コンサドーレ札幌のサポートシップパートナー(Hat trick)として、北海道コンサドーレ札幌を応援しています。
選手が「のぼり旗」を持った写真。![[コピーライト]](https://blog.ss-blog.jp/_images_e/214.gif) 2018CONSADOLE
2018CONSADOLE

FW13 UCHIMURA(2016 edition)

MF17 INAMOTO(2015 edition)

MF44 SHINJI(2014 edition)
選手が「のぼり旗」を持った写真。

FW13 UCHIMURA(2016 edition)

MF17 INAMOTO(2015 edition)

MF44 SHINJI(2014 edition)


