ロビの製作は14号~22号で両腕を組み立てる [週刊ロビ]
パーツ付き組み立てマガジンの週刊ロビの製作進捗の報告です。前回の週刊ロビの投稿はいつだったか確認したら2ケ月前でした。最後に孫のMちゃんとロビの右腕を比較している写真が載ってましたね。(#^^#)
前回が13号までの報告だったので、今回は14号~22号です。前回の投稿で「ロビの右腕が出来上がった」と最後に記述しているのですが右腕の続きがありました。(^O^)/
14号で右ボディが贈られてきたので、右ボディに右腕を取り付けてステージ2の右側が完成です。(#^^#)
14号作業の1「右腕をボディに差し込む」

14号作業の2「サーボと右腕を固定する」
これで14号の右腕が右ボディカバーに取り付けの完成です。(^^♪

前回の投稿で右腕を組み立て開始した時点で分かったことですが、可動部分は肘、肩(2箇所)なので手首は稼働しません。(-_-;)
さて、15号からは左腕の組み立てになりますが、という事は右腕と同じ作業を単純に繰り返すことになります。まあ、単純作業でも右腕は初めての作業なので新鮮味ありましたが左腕は単調な作業になりそうですね・・・w( ̄o ̄)w オオー!
前回の右腕よりは少し省略しなから左腕の組み立ての様子を載せますね。(^┰^;)ゞ
15号作業の1「指ホルダーを取り付ける」

15号作業の2「親指を取り付ける」

先程も書きましたが、やはり指と言うか手首の組み立てを行うと少し残念なんですよね。サーボモーターの大きさが統一されているので現在のサーボモーターでは無理と分かるのですが、ここの手首の稼働は何とかして欲しかったなあ・・・
「サーボケーブルに保護シールを貼る」、「サーボにサーボーケーブルを接続する」、「サーボのテストをする」、「サーボIDを書き込む」まで一気に省略します。(#^^#)
16号作業の1「サーボモーターを取り付ける」

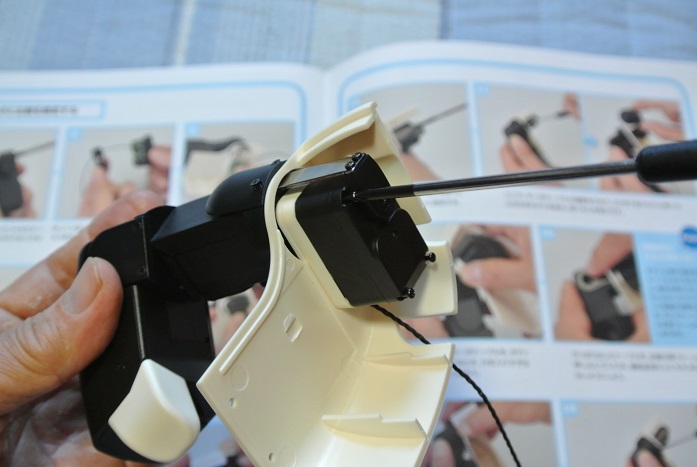
17号作業の1「ひじと前腕カバーのパーツを取り付ける」


18号作業の1「左ひじバックパネルを取り付ける」

18号作業の2「左上腕フレームを取り付ける」

ここで恒例作業です。「サーボケーブルに保護シールを貼る」、「サーボにサーボーケーブルを接続する」、「サーボのテストをする」、「サーボIDを書き込む」なので省略します。(#^^#)
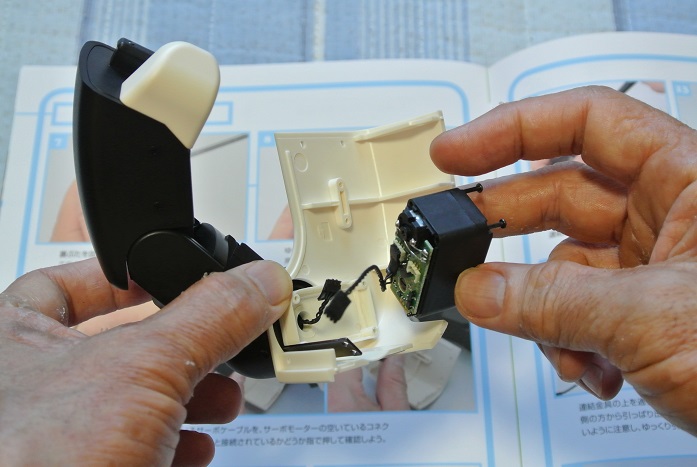
19号作業の1「2つのサーボを接続し、取り付ける」

サーボモーターに2つのサーボケーブルを取り付ける単純な作業ですが、器用とは言えない私ですから狭い箇所での作業は少しだけ苦労します。
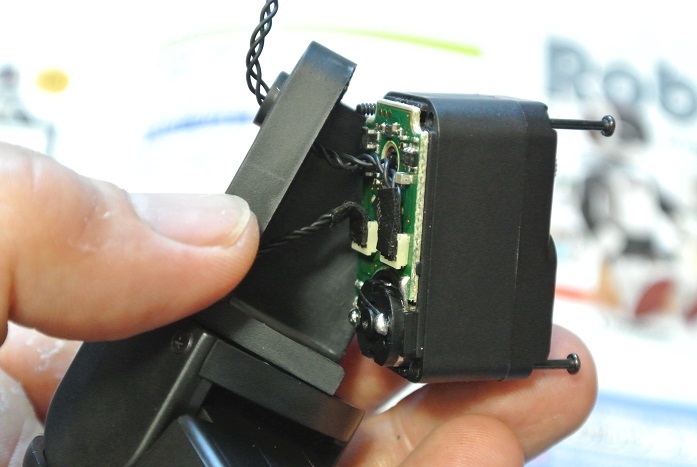
実は左腕の単調な作業なんですが、サーボモーターを上腕フレームにサーボモーターに付いているネジ4本で固定するのですが、時間を要してしまいました。
ネジが2本までは締めれるのですが後が駄目です。何度かやり直していると原因が判明したのです。取り付けするサーボモーターの上下を逆に取り付けてたのです。(;´д`)トホホ
そんな情けないミスで時間を要しましたが、関節(サーボ)が付いて左腕の形になりました。(#^^#)

20号作業の1「肩連結金具にケーブルを通す」

20号作業の2「肩フレームを取り付ける」

20号作業の3「肩パネルを取り付ける」

これで左腕をボディへ取り付ければ左腕も完成が目の前に近づきました。(^^♪
またまたですが恒例作業です。「サーボケーブルに保護シールを貼る」、「サーボにサーボーケーブルを接続する」、「サーボのテストをする」、「サーボIDを書き込む」なので省略します。(#^^#)
21号作業で作られたサーボモーターです。

やはりサーボモーターの恒例作業は単純作業で寂しいです。・"(>0<)"・
さあ、次は左ボディに左腕を取り付ける作業ですが、これって今回のブログの前述に書いた14号の作業と同じです。(^┰^;)ゞ
22号作業の1「左腕をボディに差し込む」

22号作業の2「サーボと左腕を固定する」
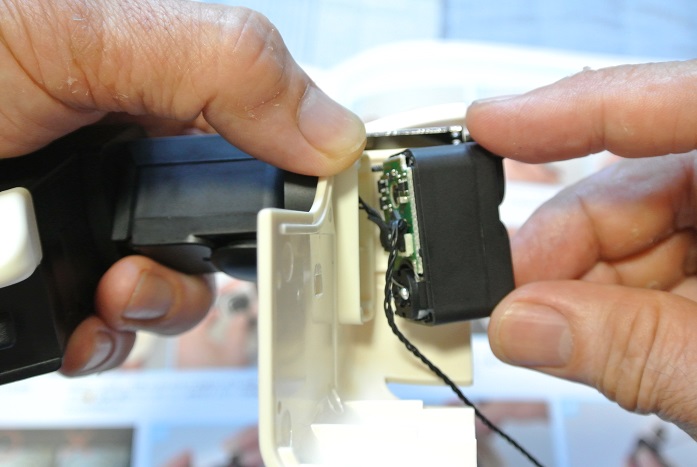
これで22号の左腕が左ボディカバーに取り付けの完成です。(^^♪

頑張って送られてくる週刊ロビを貯めてから始めた左腕作業ですがブログ用の撮影を含めて1時間+αで終わってしまった・・・w( ̄o ̄)w オオー!
それでも、これでステージ2の両腕が完成です。(#^^#)
それでは、左右のボディをビニールテープで留めて記念撮影です。カシャ♪

当然ですがボディの内部は空っぽですよ。(^┰^;)ゞ

さあ、23号からは、ステージ3の脚が始まります。
左右の脚の部分の組み立てですが、創刊号の説明を見るとステージ3は21~45号を予定していたので、左右の脚は10冊単位程ですね。
ちなみに手元には23号が届いているのですが、同梱されたのは恒例のサーボモーターが1個です。既に慣れました。驚きはしません。( ̄▽ ̄;)!!
yorokinoko さん

yorokinoko2 blog
ブログその2は画像をクリックするとジャンプします。

サポートシップパートナー
yorokinokoは、2014年から北海道コンサドーレ札幌のサポートシップパートナー(Hat trick)として、北海道コンサドーレ札幌を応援しています。
選手が「のぼり旗」を持った写真。![[コピーライト]](https://blog.ss-blog.jp/_images_e/214.gif) 2018CONSADOLE
2018CONSADOLE

FW13 UCHIMURA(2016 edition)

MF17 INAMOTO(2015 edition)

MF44 SHINJI(2014 edition)
選手が「のぼり旗」を持った写真。

FW13 UCHIMURA(2016 edition)

MF17 INAMOTO(2015 edition)

MF44 SHINJI(2014 edition)


